Software:foobar2000
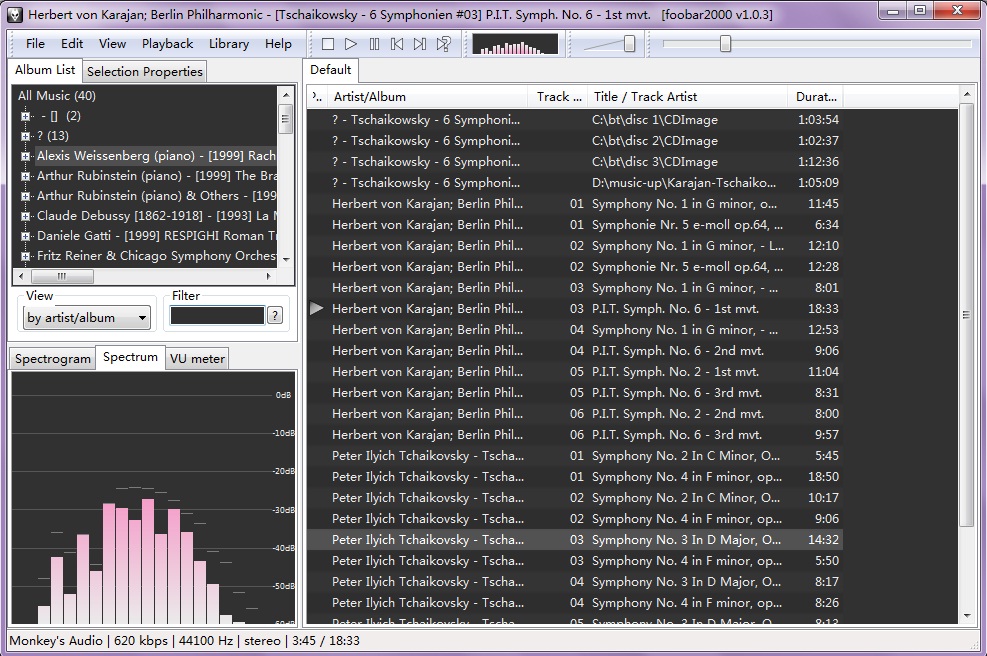
foobar2000是原Winamp工作组成员Peter Pawlowski 编写的一个专业数字音频播放器。据说是因为他不满于Winamp 2.x的插件体系架构和更倾向于图形、皮肤的发展方向的Winamp3 。
foobar2000最值得关注的在于他良好的体系架构。
除了重要的音频管道以外,播放器所有功能部件均是模块化的。可视化的核心由一个插件提供,
即使使用了不同的接口界面。这种程序架构使它成为目前最自由化的音频播放软件,任何人都被允
许利用它的接口制作附加功能模块。
主要特性:
- 开放的组件体系结构允许第三方开发者来扩展播放器的功能
- 内置音频格式支持:WAV,AIFF,VOC,AU,SND, Ogg Vorbis,MPC,MP2,MP3,WavPack,Flac
- 通过官方插件支持的音频格式:MPEG-4 AAC,Ogg FLAC,Monkey’’’’s Audio,Speex,CDDA,SPC,各种MOD类型; 从RAR、ZIP压缩包里直接读取音频
- 在Windows NT上完整的Unicode支持
- 支持播放增益(ReplayGain)
- 低内存占用,有效处理大量的播放列表
- 高级文件信息处理能力(常规文件信息窗口和批量标签)
- 高度自定义播放列表显示
- 自定义快捷键
- 通过界面插件高度可自定义的界面
- 在BSD许可协议下大部分标准组件开源
可以很简洁,也可以很绚丽。强大的可定制能力不错!我喜欢!贴几张截图欣赏下:
Movie:Stranger Than Fiction
《Stranger Than Fiction : 奇幻人生》是由马克·福斯特执导的,讲述一个普遍的幻想–我们都感觉有个叙述者在跟随我们的人生,我们的心里有声音不断提醒我们做什么,怎么去做。本片名字是取自马克吐温的名句:真相比小说还要不可思议,因为文学作品不得不亦步亦趋于可能性,而现实则随心所欲的书写故事。(Truth is stranger than fiction,because fiction is obliged to stick to possibilities;truth isn’t)
税审计员哈洛德(威尔·法瑞尔)最近总觉得耳边总有一个女人(艾玛·汤普森)声音在念叨,就像是人们生活中的种种片段的旁白。而在他的生活过程中或是 即将经历的种种生活细节尽在旁白的“掌握”中,从刷牙、洗脸的各个步骤到穿衣的顺序最后到手表的摆放位置,对他的每一个细节,这个声音都了如指掌。 这令他惊诧不已。原来,声音来自一个深居简出的英国悲剧女作家凯伦,最近她正在倾力完成自己的最新作品。而她并不知道故事的主人公就生活在现实中,而其生活的际遇与她笔下的文字不谋而合,并且,她的这个小说的结局就是主人公哈洛德的悲惨离世。虚构与现实正在奇怪地交织纠缠着。知道这一切原委的哈洛德为了拯救自己的性命,只好求助于文学教授朱利斯·赫尔波特(达斯汀·霍夫曼),一同说服女作家改变小说的结局,而凯伦则面临着出版社的催促而逐渐地加快了写作的速度……
Game:athletics
没想到走个路都这么难!考验协调性的时刻到来了!可以试玩下看。一个很小的FLASH游戏,QWOP四个键,控制运动员的身体协调。最远跑了10m,真是汗颜!
Flash地址:http://www.foddy.net/Athletics.html